- 加热炉设备
- 晶体及材料
- 破碎/球磨设备
- 压片设备
- 辊压设备
- 切割设备
- 磨抛设备
- 清洗设备
- 电池研发设备
- 薄膜制备
- 配件
- 其它实验室设备
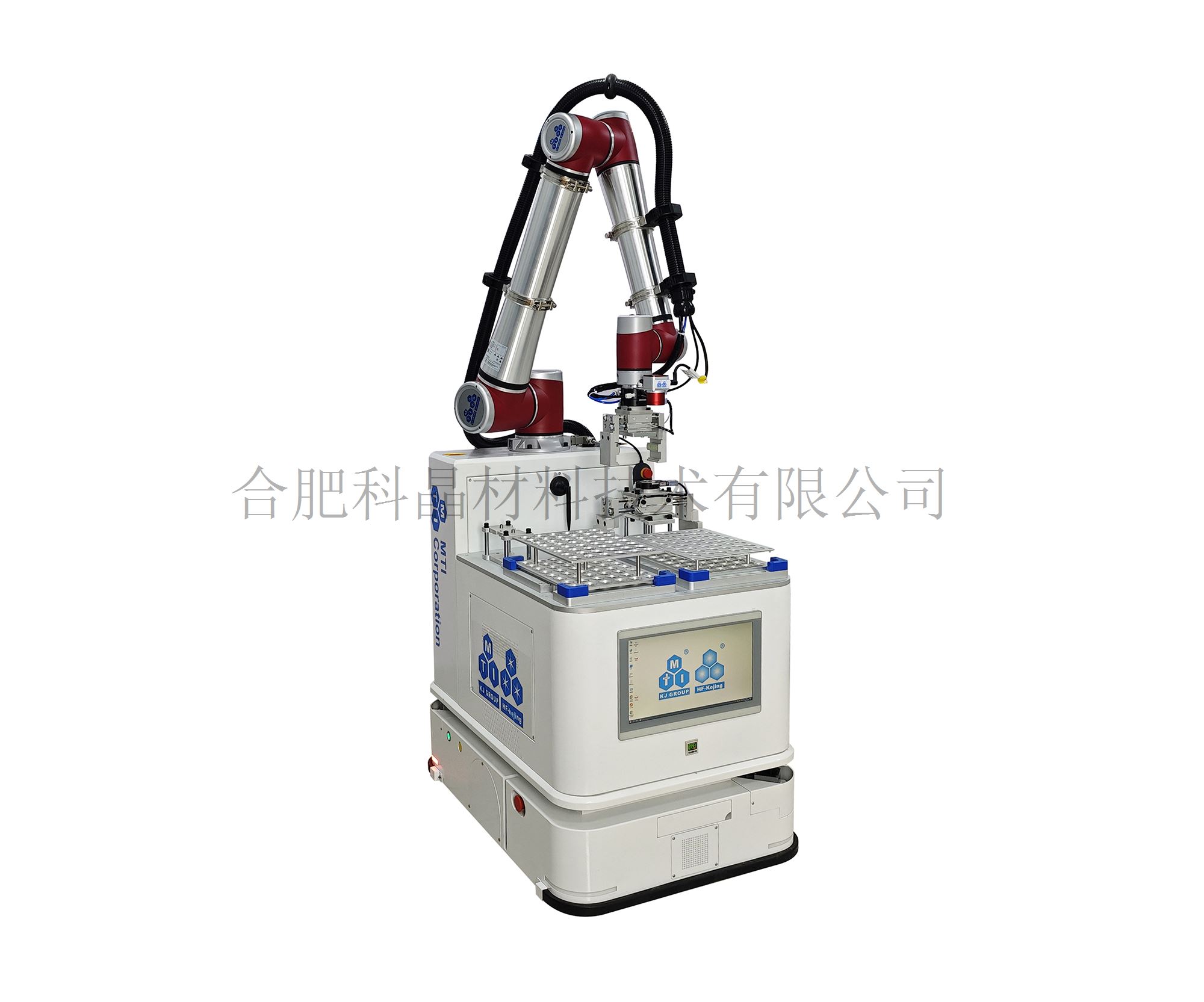
实验室AGV机器人
- 关键字:
- AI材料研发,无人实验室,实验室自动化
- 产品概述:
- 这是一款用于AI智能实验室的AGV机器人(自动导引运输车+机械臂)。可以对不同实验室无人化设备系统之间进行工艺串联,也可以配合单个智能化设备进行材料制备实验,为AI机器学习提供高质量的实验数据。
机器人采用激光SLAM导航融合视觉识别技术,无需地面改造,光线/环境适应强。AGV机器人可以根据需要在实验过程中更换夹爪。
免责声明:
本站产品介绍内容(包括产品图片、产品描述、技术参数等)仅用于宣传用途,仅供参考。由于更新不及时和网站不可预知的BUG可能会造成数据与实物的偏差,请勿复制或者截图。如果您对参数有异议,或者想了解产品详细信息及更多参数,请与本公司销售人员联系。本站提供的信息不构成任何要约或承诺,请勿将此参数用于招标文件或者合同,科晶公司会不定期完善和修改网站任何信息,恕不另行通知,请您谅解。
如果您需要下载产品的电子版技术文档,说明书(在线阅览),装箱单,与售后安装条件等文件,请点击上方的附件下载模块中选取。商城产品仅针对大陆地区客户,购买前请与工作人员沟通,以免给您带来不便。
技术参数产品视频实验案例警示/应用提示配件详情
| 名称
|
·实验室AGV机器人 |
| 特点
|
·专为材料制备实验设计,功能多样,可以负责材料/配件转运与实验具体工艺操作步骤。
  
·可以在实验过程中根据设定自动更换夹爪,适应不同的设备

·开放通讯协议,可以嵌入客户已有的系统。目前已经加入国内多个知名平台 ·手动和自动两种控制方式 ·视觉避让等多重报警及保护功能
|
| 基本参数
|
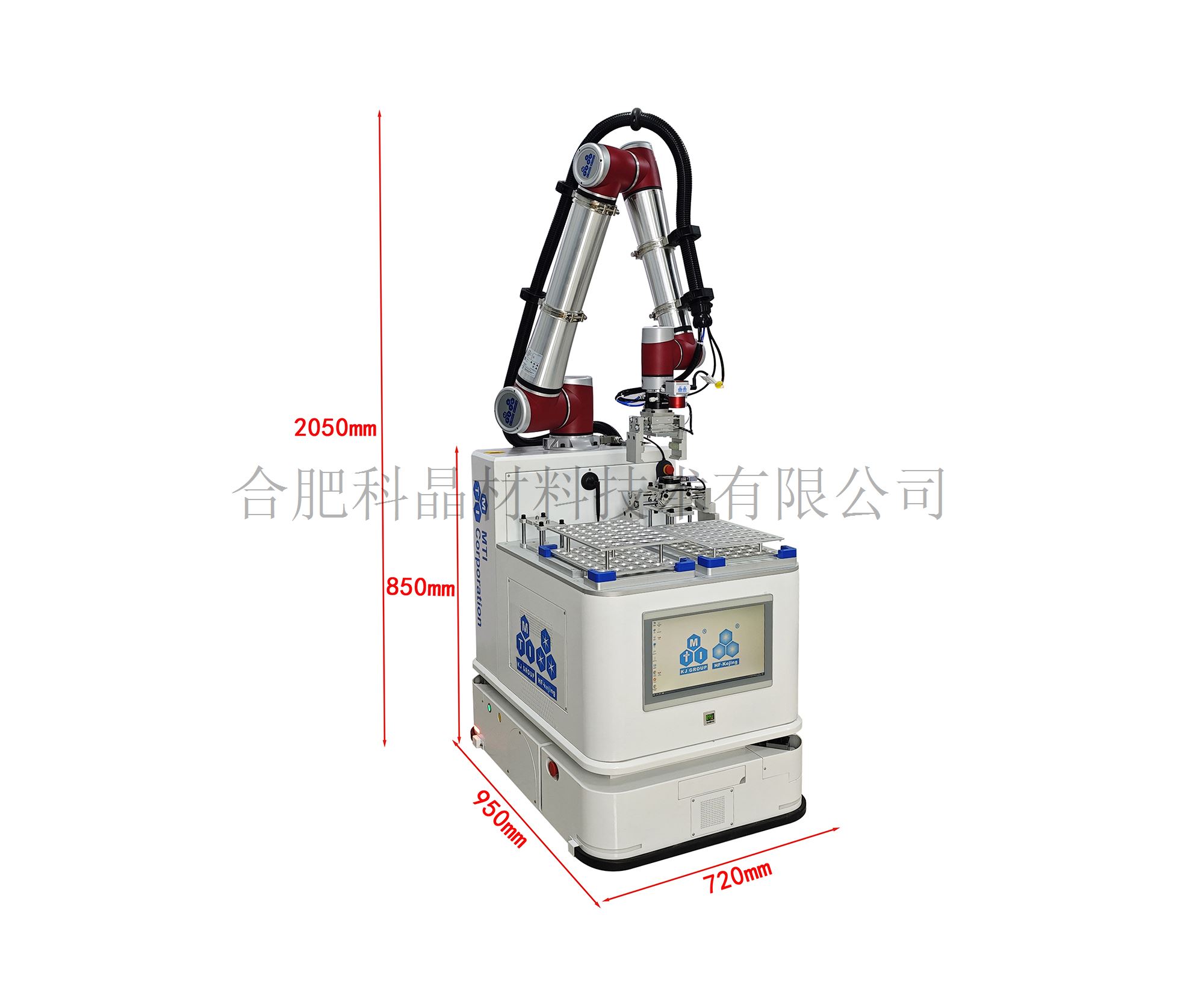
·整机综合定位精度:±0.5mm(可定制) ·机械臂工作半径:≤1327mm(需配视觉) ·机械臂末端负载:≤12Kg(含末端夹具,可定制) ·机械臂末端速度:≤1.5m/s ·设备总重量:≤400kg ·背负负载:≤155Kg ·导航方式:激光SLAM*2(对角布局) ·整机外形尺寸:L950mmxW720mmxH850(mm)(不含手臂/尺寸公差±2mm),可定制 ·移动方式:双轮差速移动(支持前后移动/原地旋转) ·盘移动速度/加速度:≤1.5m·s-1 (额定负载下推荐0.8m·s-1)/ ≤0.3m·s-2 ·底盘越障高度:≤10mm,底盘过缝宽度:≤30mm ·体回转直径:1000mm ·走通道宽度:Min 820mm,转通道宽度:Min 1200mm ·爬坡性能:3°/ 5% ·面平整度要求:3mm/m ·站点定位精度:±10mm(静态环境下,车身自身重复定位精度),站点角度精度:±1°,精准对接精度:±5mm(选配二维码辅助定位) 
|
| 结构
|

|
免责声明:
本站产品介绍内容(包括产品图片、产品描述、技术参数等)仅用于宣传用途,仅供参考。由于更新不及时和网站不可预知的BUG可能会造成数据与实物的偏差,请勿复制或者截图。如果您对参数有异议,或者想了解产品详细信息及更多参数,请与本公司销售人员联系。本站提供的信息不构成任何要约或承诺,请勿将此参数用于招标文件或者合同,科晶公司会不定期完善和修改网站任何信息,恕不另行通知,请您谅解。
如果您需要下载产品的电子版技术文档,说明书(在线阅览),装箱单,与售后安装条件等文件,请点击上方的附件下载模块中选取。商城产品仅针对大陆地区客户,购买前请与工作人员沟通,以免给您带来不便。





 查看诚信档案
查看诚信档案


 皖公网安备 34012302000974号
皖公网安备 34012302000974号